In the context of the project, a system of Internet-of-Things sensor technology has been developed, which enables precise indoor positioning. Conventional technologies such as the Global Navigation Satellite System (GNSS), commonly known as GPS, cannot be used for this purpose due to the weakening of satellite signals by building structures. Furthermore, commonly used technologies for this purpose, such as Wi-Fi, Bluetooth, Infrared, Ultrasound, RFID/NFC, cannot meet the specifications for connecting a large number of nodes, as well as for accurate location tracking. Specifically, the maximum achievable accuracy provided by the aforementioned technologies often ranges from 1 to 5 meters, while they are also highly susceptible to interference from systems operating at similar frequencies or signal reflections within the building structure of the complex.
Within the scope of the project, a system for indoor positioning using Ultra-Wide Band (UWB) technology has been designed and implemented.

This system consists of a set of fixed nodes (Anchors), which are installed within the building, as well as multiple mobile nodes (Tags), each corresponding to a visitor of the space, as depicted in the following image.

The key features of this system can be summarized as follows:
- It provides high precision in measuring the distance between fixed and mobile (visitor) nodes within the network. Based on experimental measurements, the average position accuracy is in the range of 12-15 cm.
- It offers multiple operating scenarios (slow/fast walking, continuous or intermittent operation, vehicle movement, etc.) to maximize energy autonomy. Additionally, the motion sensors it possesses detect when the device is actually in motion, allowing for more effective energy management.
- It accommodates a large number of mobile devices in the same space.
- It supports the transmission of data for traffic mapping and the extraction of statistics in near-real-time.
- All data transfers between network devices, up to the local gateway, are carried out using UWB technology.
- It provides automated software for system configuration in new installations.
- It allows interoperability with similar positioning systems based on UWB technology.
- It is easily expandable, enabling the addition of additional fixed nodes and supporting their automated configuration to make them operational within the existing system.
- It is cost-effective.
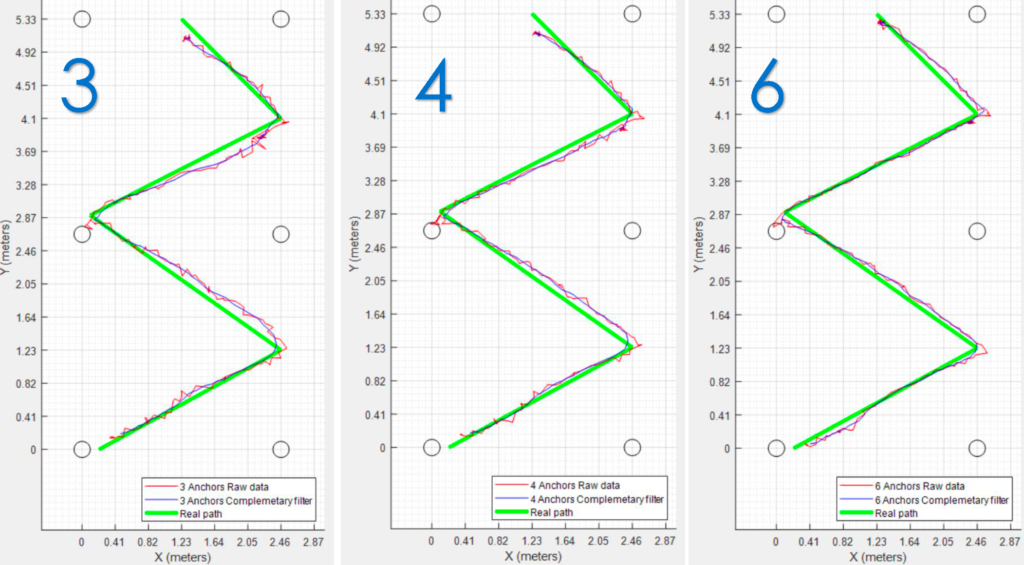
Determining the position of a slowly moving visitor
The movement speed is approximately 0.5-1.0 m/sec. The position is determined based on distance measurements obtained from 3, 4, and 6 fixed nodes (the positions of which are marked with circles) in the space.
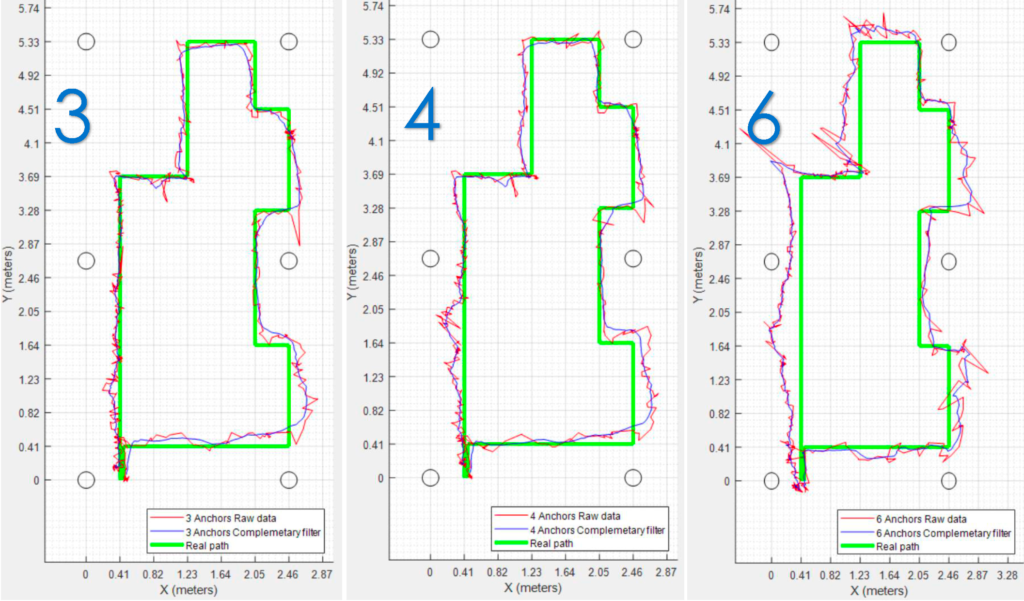
Determining the position of a fast-moving visitor
The movement speed is approximately 1.0-1.5 m/sec. The position is determined based on distance measurements obtained from 3, 4, and 6 fixed nodes (the positions of which are marked with circles) in the space.
The initial configuration process of the positioning system is quite demanding, as small deviations in the coordinates of the fixed nodes’ locations can lead to significantly degraded measurement quality. Often, this requires the use of topographic maps that accurately depict the positions of these nodes’ installations. Although this approach leads to the best possible results, it is often impractical for various reasons (e.g., maps may not be available). To address this issue, within the project, software for automated space mapping has been developed, in which the coordinates of the fixed nodes are accurately recorded with a precision ranging from 95-97%.

Finally, for the easy installation and operation of the positioning system, software for visualizing the fundamental actions that need to be applied during both the system configuration process and the extraction of its measurements has been developed.
